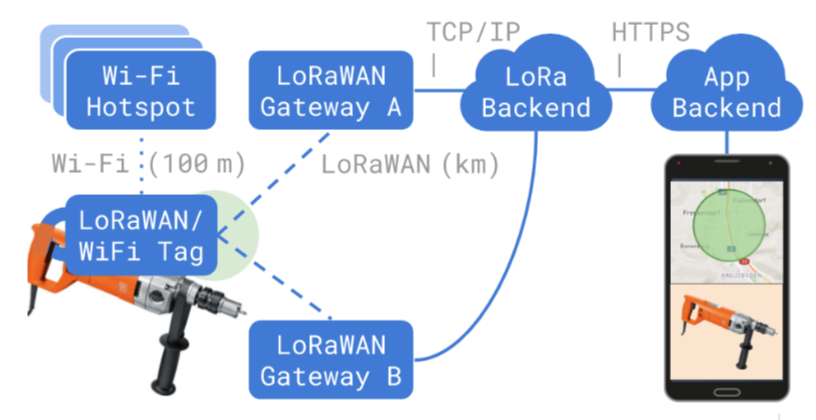
Gesucht wird für das Baugewerbe eine Methode zur Lokalisierung von Werkzeug auf Baustellen, um die Werkzeugverwaltung zu optimieren. Dabei wird untersucht, ob sich der Datenübertragungs-Standard LoRaWAN für die Geolokalisierung von Werkzeug auf Baustellen eignet. LoRaWAN soll dabei als kostengünstigere und energieeffizientere Alternative zur herkömmlichen Geolokalisierungsmethode GPS über das Mobilfunknetz eingesetzt werden. Dafür werden die Methoden Lokalisierung mittels Signalstärke (RSSI), Lokalisierung mittels GPS über LoRaWAN und WLAN basierte Ortung analysiert und miteinander verglichen.
LoRaWAN, The Things Network, Geo-Lokalisierung, RSSI, WLAN basierte Ortung
Ziel dieser Arbeit ist es, eine kostengünstige Methode zu finden, mit welcher das Werkzeug lokalisiert werden kann und den effektiven Standort auf einer Karte dargestellt werden kann. Untersucht wird, ob sich dafür die LoRaWAN Technologie eignet.
Der Kunde Meyer Handwerkerzentrum verkauft Werkzeugeverwaltungs-Dienstleistungen an Bauunternehmen, welche sich mehrheitlich in der Nordwestschweiz befinden. Das Werkzeug wird dabei vermietet, gewartet und ersetzt. Zudem verkauft Meyer HWZ eine Applikation zur Werkzeugverwaltung namens meyTrack. Darin kann der Standort eines Werkzeugs, z.B. ein Werkhof oder eine Baustelle, manuell eingegeben werden. Die tatsächliche Position des Werkzeuges kann sich aber ändern, zum Beispiel, wenn Werkzeug an ein weiteres Bauunternehmen ausgeliehen wird. Bei den Kunden von Meyer Handwerkerzentrum geht ab und zu Werkzeug verloren. Dieses wiederzufinden ist schwierig und zeitintensiv, da sich die Geräte oft nicht mehr am ursprünglich erfassten Ort befinden und viele verschiedene Personen im Arbeitsprozess involviert sind.
Die Positionsberechnung mit LoRaWAN RSSI blieb unter den Erwartungen. Da der RSSI von verschiedenen Faktoren stark beeinflusst wird, kann nur eine Genauigkeit von 1 bis 3.5 km erreicht werden.
GPS liefert wie erwartet genaue Positionsdaten. Der Stromverbrauch ist höher als bei den anderen beiden Varianten und ein Deep Sleep Mechanismus komplexer zu implementieren. Ein weiterer Nachteil von GPS ist, dass der Node Satellitenkontakt benötigt, was bei Werkzeug auf Baustellen und Werkhöfen nicht immer der Fall ist.
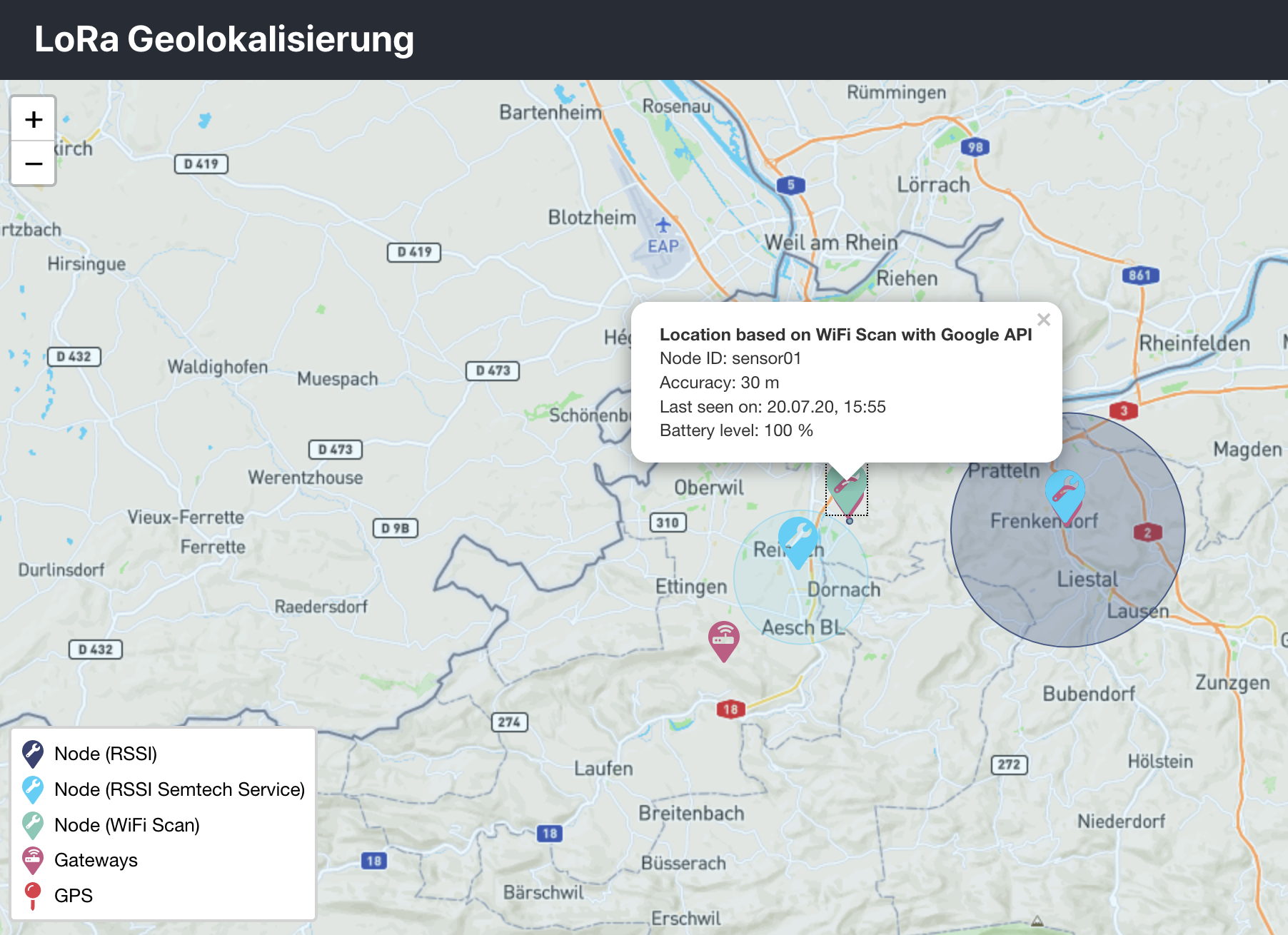
Die Variante WiFi Scan erzielte bei den Versuchen die besten Resultate. Die Genauigkeit übertrifft die Anforderung, die Position des Nodes auf mindestens 500 m genau angeben zu können. Die einzige Bedingung für diese Methode ist jedoch, dass der Node Empfang zu mindestens zwei WiFi Netzwerken hat. Bei Büros/Werkhöfen ist dies meist der Fall, bei den Baustellen kommt es auf die Umgebung an. Liegt die Baustelle nicht in einem dichten Siedlungsgebiet kann unter Umständen kein WiFi Netzwerk erreicht werden. Wenn dieser Fall eintritt, kann als Fallback die Positionsberechnung mit RSSI zum Zuge kommen.
Bei allen Versuchen konnte festgestellt werden, dass die Netzabdeckung in der Nordwestschweiz noch nicht optimal ist. Bewegende Nodes, welche im Intervall von einer Stunde sendeten, wurde in gewissen Gegenden den ganzen Tag nicht gesehen. In ländlichen Gebieten hat es nicht genügend Gateways. In den Urbanen Gebieten scheint die Reflexion einen grossen Einfluss auf die Erreichbarkeit der Signale zu haben.
Der Prototyp wurde in zwei verschiedenen Varianten umgesetzt. Zum einen wurde ein User Interface Prototyp erstellt, welcher die Positionen der Nodes auf einer Karte darstellt, um die verschiedenen Geolokalisierungs-Varianten darzustellen und miteinander vergleichen zu können. Zum anderen wurde für einen optimalen Kundennutzen die Positionsdaten in die bestehende Lösung meyTRACK integriert.
Meyer Handwerkerzentrum https://www.meyerhwz.ch/
Sandra Amport sandra.amport@students.fhnw.ch
Thomas Amberg, thomas.amberg@fhnw.ch